S. Zhu and Z. Kincaid, ‘Termination analysis without the tears’, in Proceedings of the 42nd ACM SIGPLAN International Conference on Programming Language Design and Implementation, New York, NY, USA, Jun. 2021, pp. 1296–1311. doi: 10.1145/3453483.3454110.
Basic Ideas
Following the framework of Algebraic Program Analysis, the program is represented as a (omega-) regular expression, denoting all control flow trace of it. Then the expression is interpreted in an algebraic structure.
- For regular subexpression, the denotation is a transition formula and operators are interpreted in the usual way (Klenne Star computes a reflexive transitive closure).
- For omega regular subexpression, the denotation is mortal precondition, a condition which ensures termination.
- choice is conjunction (mortal on all paths)
- concatenation is weakest precondition (a state is mortal only if can reach only mortal states)
- w-iteration computes mortal precondition for a transition formula.
The method is sound
Mortal Precondition Operator
The most important and interesting part is how to define these operators.
Using Ranking function
There is a complete method for synthesizing linear lexicographic ranking function (LLRF) for transition formulas. Thus a mortal precondition operator can be defined as:
- mp(F) = true if there is a LLRF for F
- mp(F) = , otherwise
where pre(F) is the guard part of the formula F (containing only unprimed variables).
Using Overapproximation
When computing the reflexive transitive closure of a formula (e.g. for interpreting Klenne Star), overapproximation might be needed. Suppose the formula overapproximates the formula , then a mortal precondition operator can be obtained as follows:
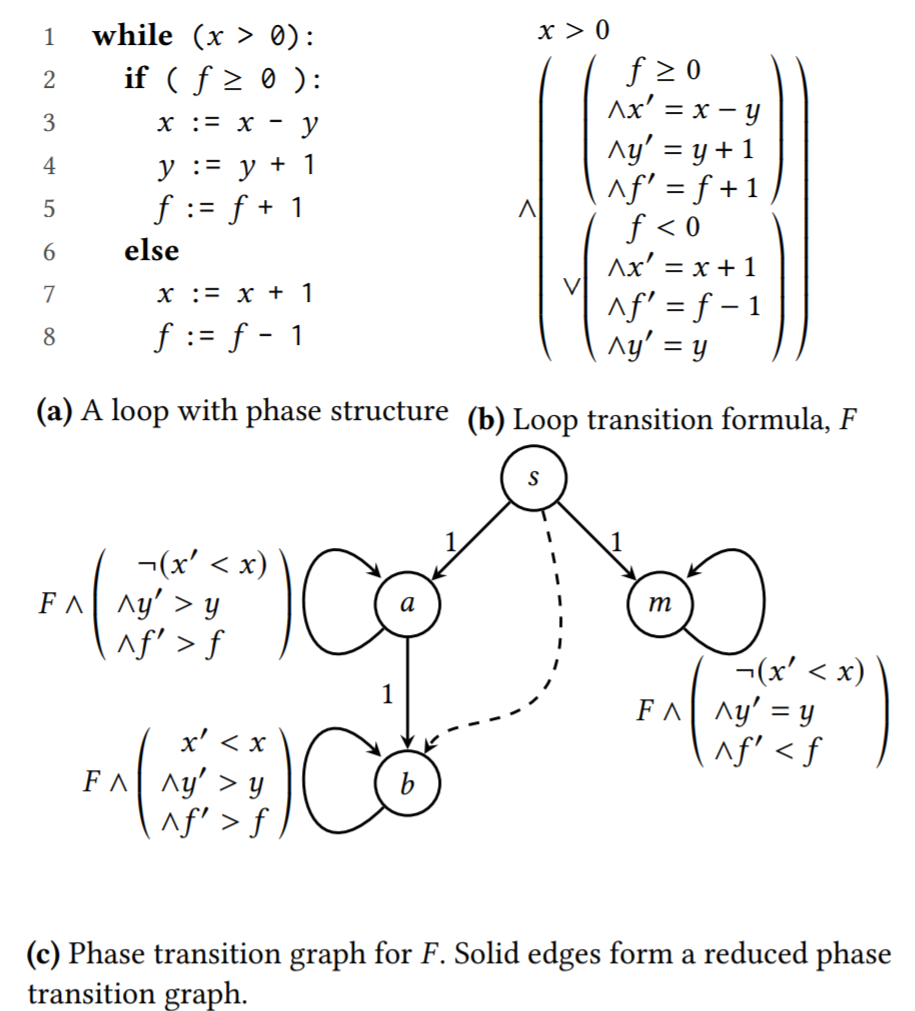
Phase Analysis
Computing mortal precondition for a single transition formula is hard. Phase analysis combinator can improves the precison of a given mortal precondition operator by observing and extracting the phases in a transition formula.
Phase
For a transition formula F, we say a transition formula p is F-invariant, iff .
Intuitively, if some transition of F satisfies p, then any subsequent transition F also satisfies p.
Fix a set of predicate P1, we denote the set of F-invariant in P as I(F, P)2. These F-invariant can be used to partition the transition of F into cells. Each of these cells satisfies several F-invariant, and violates others in I(F, P). That is, every cell has the form
where
Since all predicates in I(F,P) are F-invariant, if a computation enters a cell, then all subsequent transition satisfies X as well. So the next cell could only addtionally satisfy predicates in . Thus, an infinite computation eventually remains in a cell.
Phase Transition Graph
A graph with cells and a root s as vertices.
- Each cell has a self-loop, labeled by the cell’s transition formula
- if is satisfiable, then there’s an edge from to , labeled by
1(or ) - There’s edge from
sto every unreachable cell, labeled by1(or )
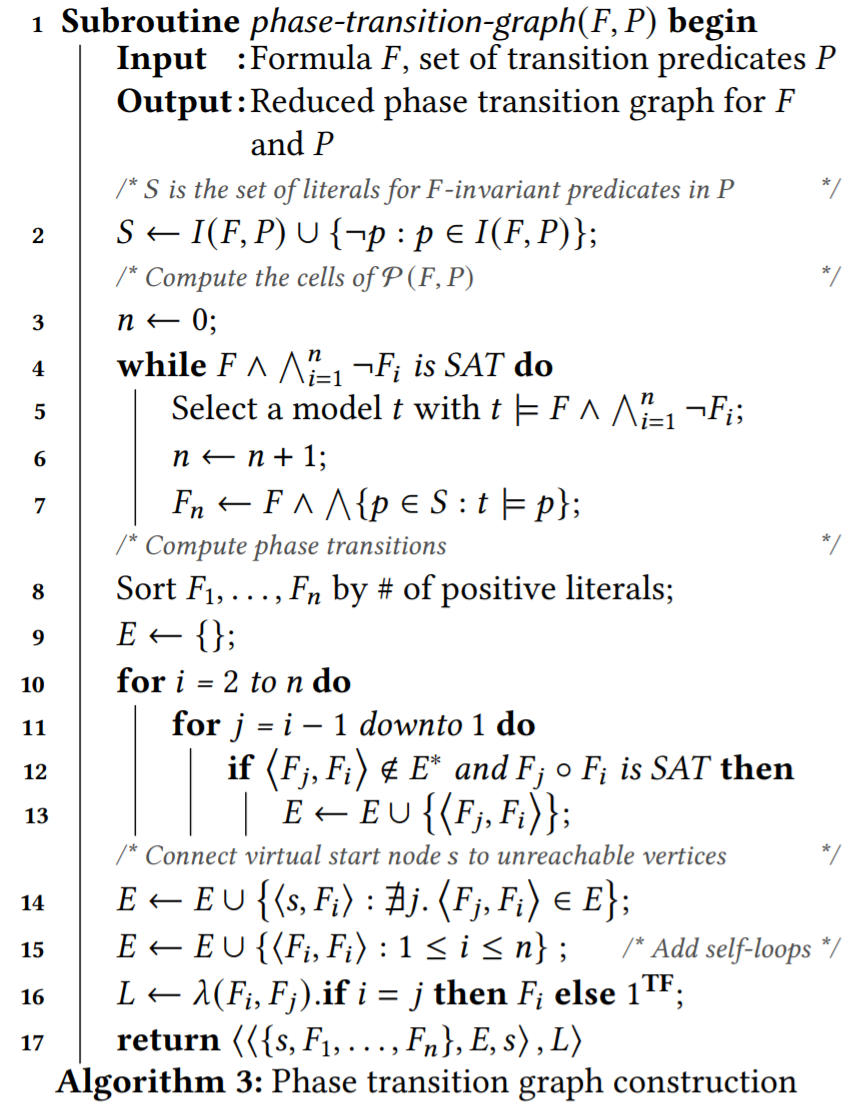
How to construct phase transition graph from transition formula
The following algorithm first computes F-invariants, and partition F to several cells by checking satisfiability and selecting models. Then the graph is constructed by checking each pair of cells.
Phase Analysis Combinator
Having the Phase Transition Graph, we compute the mortal precondition of root s by the normal algebraic program analysis method (regarding the graph as regular expression and interprecting it using a given mortal precondition operator)
we write for the new operator, using predicate set P and operator mp
Other combinators
Suppose that mp1 and mp2 are mortal precondition operators. Then we can combine mp1 and mp2 into a single mortal precondition operator.
and
Note: In the latter case, is always included in the result. It just ask to compute mortal states for those not handled by